Mathematical Model of Best Fit Theory
Forward Emergence Framework
1. Introduction
The Best Fit Theory proposes that reality does not unfold as a single fixed path from the beginning. Instead, at any starting point, multiple possible trajectories exist, shaped by interacting variables, constraints, and uncertainties.
Traditional probabilistic methods, such as Monte Carlo simulation, focus on generating a wide range of possible future outcomes from an initial state. The Best Fit Theory extends this idea by introducing a complementary perspective: the realized outcome can be understood as the trajectory that becomes most dynamically stable and compatible under evolving conditions. This chapter formalizes that idea into a mathematical framework.
2. Initial System State (T₀)
At the initial time , a system is defined by a set of variables:
Each variable represents a factor influencing system evolution, such as resources, decisions, environment, risk, or opportunity.
Each variable carries an associated influence weight:
3. System Evolution Over Time
The system evolves dynamically over time through interaction among weighted variables.
The state of the system at time is defined as:
The evolution of the system can be expressed as:
Where:
This equation reflects that system change is cumulative, nonlinear, and influenced by weighted interactions of variables over time.
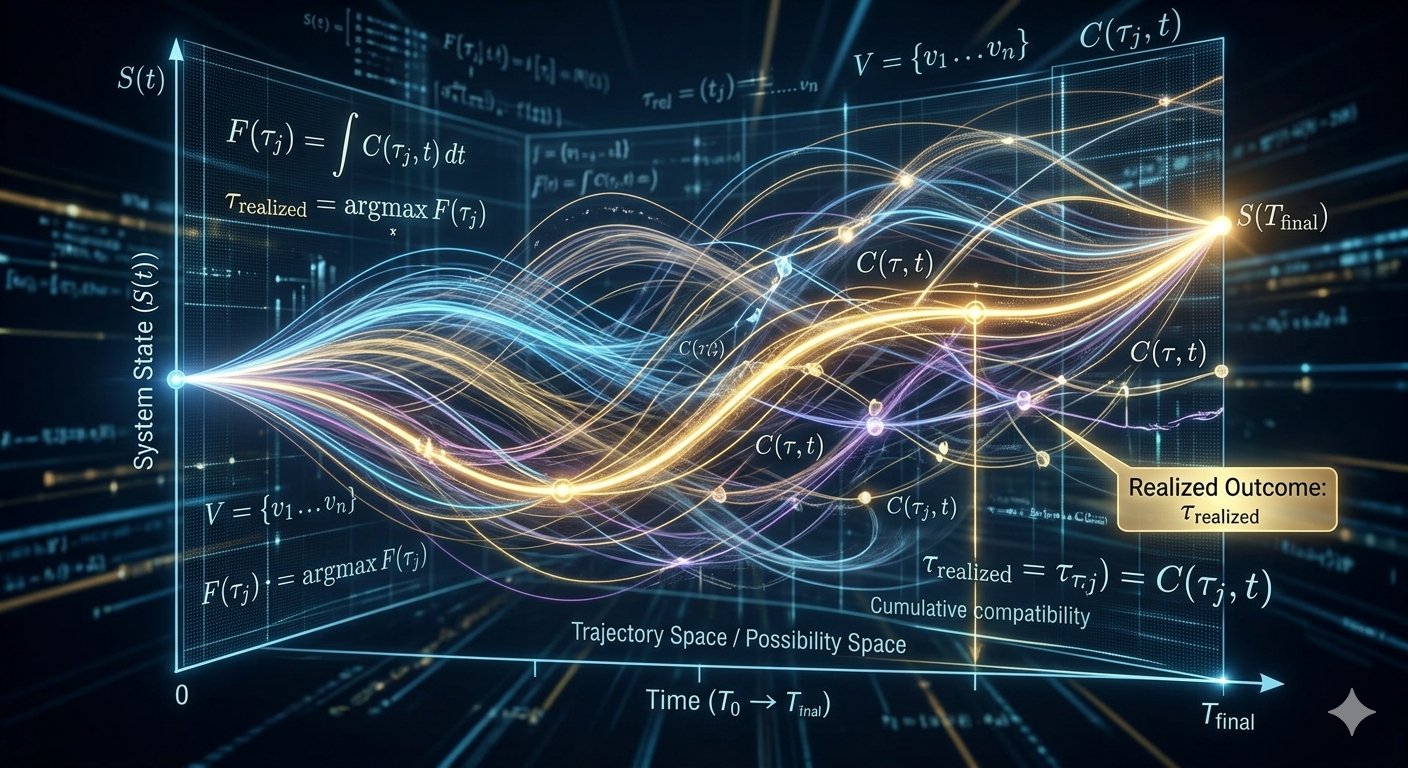
4. Trajectory Space (Possible Outcomes)
Let :
This aligns conceptually with Monte Carlo simulation, where many potential futures are generated.
5. Trajectory Fit Function
Each trajectory is evaluated based on how well it aligns with evolving system conditions.
Define a fit function:
Where:
Here:
This function measures how consistently a trajectory remains viable under changing constraints, feedback, and interactions.
6. Best Fit Principle (Trajectory Selection)
The realized outcome is defined as the trajectory with maximum cumulative compatibility across time.
This means:
- among all possible trajectories
- the system converges toward the one with highest overall fit
This trajectory is not necessarily optimal in a moral or ideal sense, but it is the most dynamically sustainable under the given conditions.
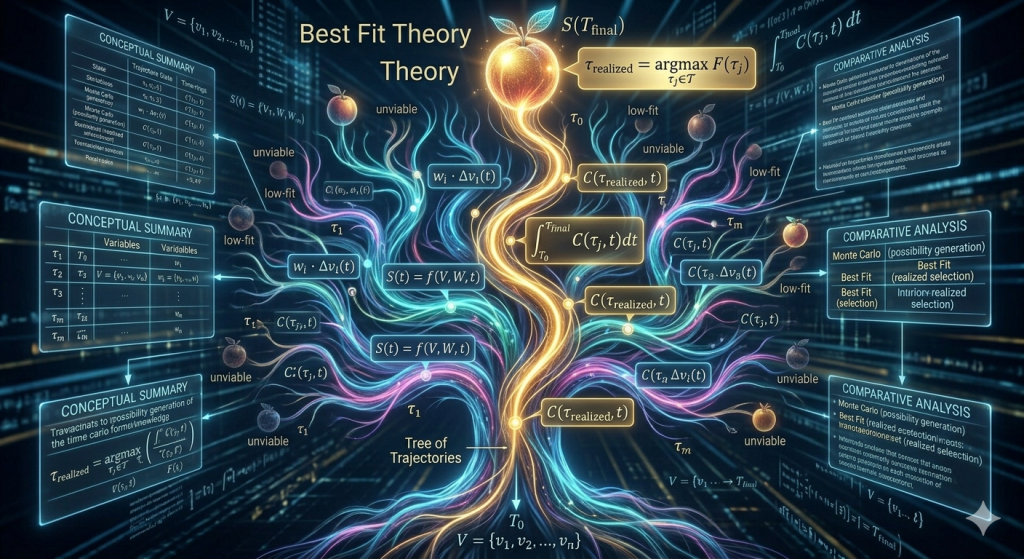
7. Monte Carlo vs Best Fit Interpretation
This framework can be interpreted as a two-directional system understanding:
Monte Carlo Perspective (Forward Analysis)
- Generates many possible trajectories
- Estimates future outcome distribution
Best Fit Perspective (Backward Analysis)
- Identifies which trajectory became actualized
- Reconstructs causal-weighted path from initial conditions
Together:
- Monte Carlo explores possibility space
- Best Fit Theory explains realized selection from that space
8. Core Insight
The central proposition of the model is:
A realized outcome emerges not from a single deterministic path, but from a competition of weighted trajectories, where one path becomes dominant through cumulative compatibility with evolving system conditions.
9. Conceptual Summary
10. Closing Statement
The Best Fit Mathematical Model does not claim that outcomes are pre-decided. Instead, it suggests that reality stabilizes into the trajectory that maintains the strongest cumulative fit under continuously evolving conditions.
This provides a structured way to understand how complex systems move from uncertainty to realized outcomes across time. This trajectory is Best fit and not anything else !





